
…..haben Sie schon mal in die technischen Daten geschaut, mit welchen Spannungen die älteren Geräte konzipiert und betrieben wurden?
Oder: exlusiv teure Geräte werden mit billigsten Steckernetzteilen betrieben? (z.B. 2 x 16V Synchronmotor der TR Reihen)?
Insbesondere am Thorens TD 124 und am Lenco gefiel mir die Überspannung nicht, da die Motoren verhältnismässig warm weden und ich mir nicht sicher war, was die “Überspannung” mit dem Gleichlauf macht. Und der ist unabdingbar für ein genussvolles entspanntes Hören.
Monate habe ich Lösungen recherchiert, nach Zusatznetzteilen geschaut, und bin angesichts der Preis dann zu einem eigenen Konzept zurückgekehrt. Und das sieht folgendermassen aus:
ein Sinusgenerator (AD9850) erzeugt ein Sinussignal einstellbarer Frequenz und Phasenlage, dass verstärkt und einem 2 fach Ringkerntransformator zugeführt wird, der das erzeugte Signal AUFTRANSFORMIERT.
Klingt einfach, das Prinzip ist auch schon älter, aber die Realisierung brauchte doch Zeit und einige Experimente. Aber nun steht die Lösung und hat sich gelohnt!!
Bevor das Ganze in ein optisch ansprechendes Gehäuse wandert, stelle ich die Lösung einmal vor.
Hier läuft das Netzteil am Lenco L75
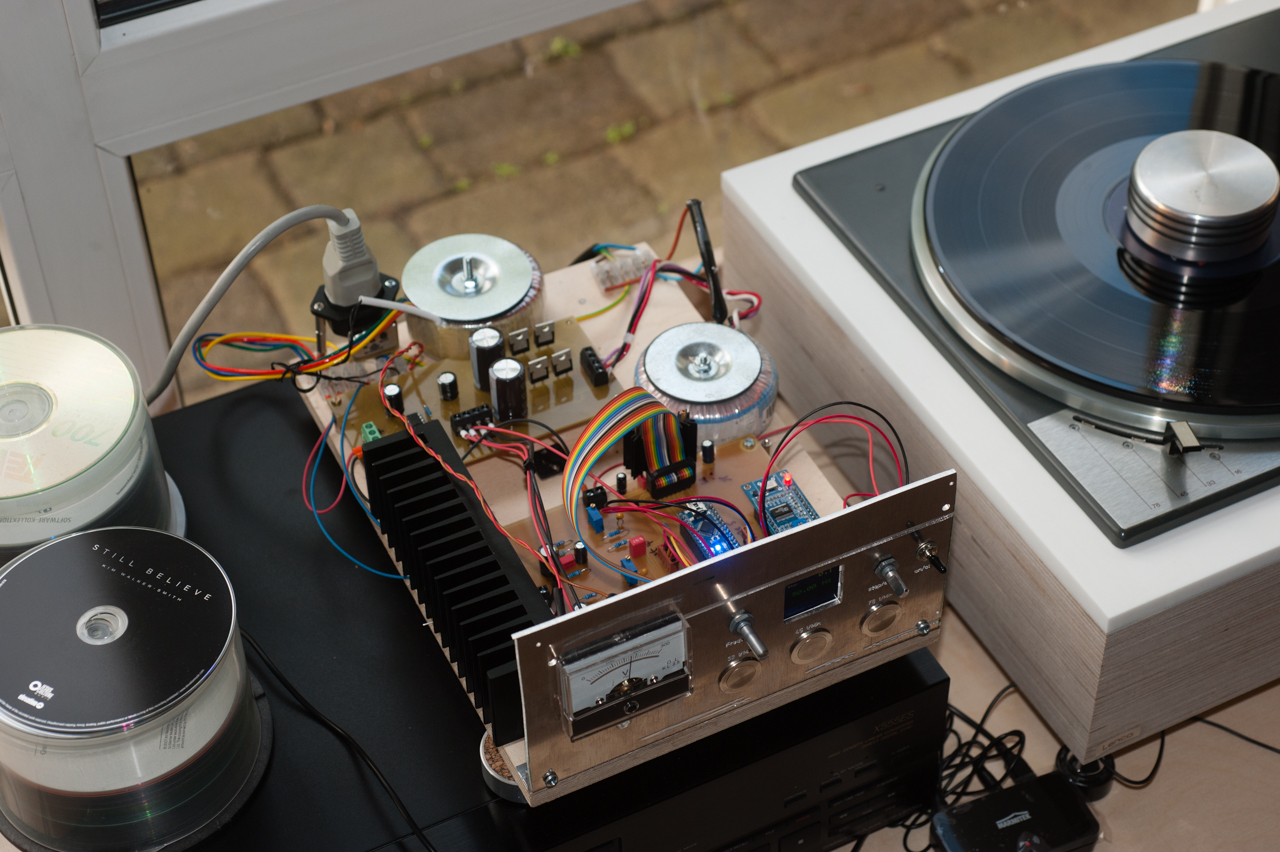
Der Aufbau:
Links gelb gerahmt der 2 kanalige Audioverstärker mit einem LM Leistungsverstäker (68W),
daneben rot der Arduino nano zur Steuerung des Sinusgenerators
danaben rechts weiss gerahmt das AD9850 Modul.
Gespeist wird das Ganze von einem Netzteil, dass ca. 2 x 26V liefert, für die Digitalelektronik auf saubere 5V heruntergestuft wird (der AD9850 ist extrem spannungsempfindlich!!).
Hinter dem Analogverstärker folgt dann der auftransformierende Ringkern mit 2 x 12V Primäreinspeisung.
Trickigerweise wird die erzeugte Spannung im Audioverstärker über 2 x 100k Trimmer (oder später ein Front-Poti) quasi als Lautstärkeregler pro Kanal gesteuert.
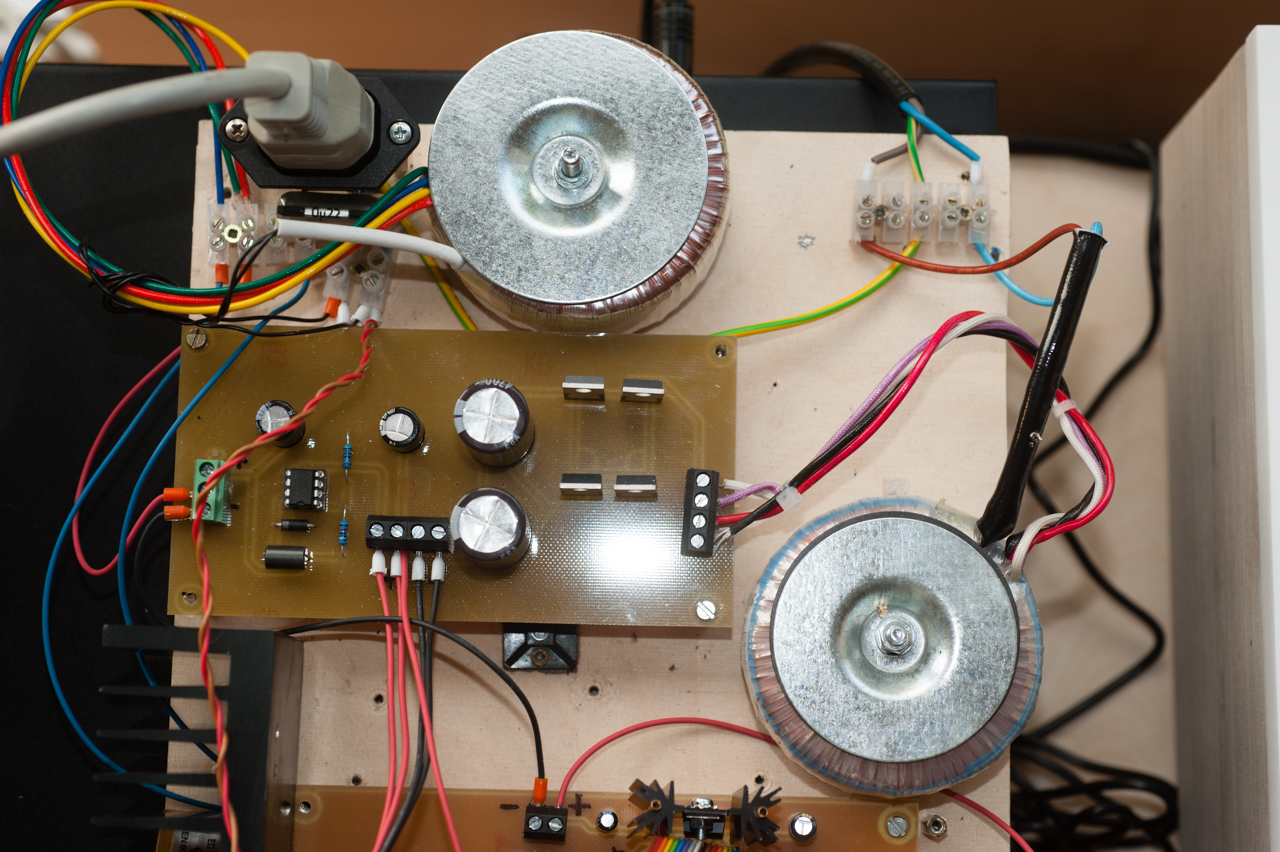
Oben links der auftransformierende Ringkern mit verdeckten Entstörkondensator und unverwechselbaren Ausgang.
In der Mitte rechts der 2 x 18V Netzteil Ringkern und links daneben das Netzteil.
Selbstredend sind Schutzleiter und Entsörung sicher umgesetzt!! Es liegen an einigen Stellen 220V – 235 Volt Spannung an!

Das an der Front positionierte Volt MEsszeigerinstrument zeigt exakt die Ausgangsspannung an, so dass durch drehen der Lautstärkepotis die Spannung dem Sollwert des Motors angepasst werden kann.
Das reicht beim Lenco L75 Motor aus, wenn er mit 50Hz gespeist wird.
Die besten Laufeigenschaften habe ich akustisch mit Stethoskop auf der Coriandeckplatte liegend abgeglichen.
Meines Erachtens ist er bei 190V am laufruhigsten.
Anders stellt sich die Sache am Thorensmotor dar, der sowohl über Spannung als auch Frequenz gesteuert werden kann.
Hier kommt nun die Steuerung durch den Arduino zum Einsatz.
Mittels geeigneter Programmierung kann sowohl die Frequenz in 0,1 Hertz Schritten als auch die Pahsenlage angepasst werden, somit also 3 Parameter.
Auch der Thorens profitiert von dieser Art der Spannungsversorgung. Er läuft noch ruhiger, Restgeräusche, die vor allem durch den Riemen verursacht wurden, sind minimiert.

Das kleine Display in der Mitte der Gehäusefront informiert über die Frequenz, Phasenlage und die Schrittweite der Frequenzverstellung.
Der linke Drehimpulsgeber verändert die Frequenz oder die Phasenlage. Auf Druck werden die Werte im EEPROM gespeichert und den Start-Tasten der 3 Geschwindigkeiten zugeordnet.
Der rechte Drehimpulsgeber legt die Schrittweite der Frequenz bzw. der Phasenlage fest.
Daneben noch der (Niederspannungs)-Einschalter.
Und wenn nun ein Synchronmotor – wie der TR Fatbob – zum Einsatz kommt, wird das Sinussignal VOR dem Ausgangs-Trafo mit 2 x 16Volt ausgezweigt und alle Möglichkeiten stehen am Synchronmotor in gleicher Weise bereit.
Spannende Frage, was das Ganze akustisch bringt:
Lenco L75: nochmalige Reduzierung des Motorlaufgeräusches, solideres Klangfundament, der Spieler fühlt sich wohl!
Thorens TD 124: der Motor wird längst nicht mehr so warm, wie herkömmlich an 235 V betrieben.
Die Drehzahl steht wie eine Eins, elegant ist das Umschalten auf elektronischen Weg.
FatBob: hier ist der Gewinn sehr sehr deutlich! Die Gleichlaufschwankungen gehen sehr deutlich und messbar zurück, viel stabileres Klangbild, DEUTLICHER Zugewinn.
Kosten:
Material:
– 2 Rinkerntrafos a 20 €
– arduino nano 5€
– AD 9850 12€
– Display 5€
– Messzeigerinstrument 10€
– LM 2 x 5,50 €
– diverse Kleinteile 20€
Der Aufbau hat sich gelohnt, weil das Hören entspannter und noch eine Spur musikalischer geworden ist.
Und ich habe die Geräte wieder ihrer Ursprungs-Spezifikation zugeführt. Hier noch ein paar Bilder zum Gehäuseaufbau.

Dortmund Juni 2017