

Manchmal macht die Not erfinderisch, so bei dem “Geschenk” einiger Feickert Twin Laufwerkteile. Diese hatte mir ein Freund überlassen – allerdings ohne die schweren Edelstahlplatten und ohne Motordose.
Also musste eine geeignete Motordose her, und da kam mir ein Revox Motor aus einer teilgeschlachteten Revox B77 genau recht.
Dieser Revox Motor ist “ein Pfund”, enorm drehmomentstark und laufzeitstabil.
Vorbemerkungen
Das Dr. Feickert Twin Laufwerk ist schwer (ca. 30kg) und hat ein ausgezeichnetes Lager. Dennoch brauchen Laufwerke, die über Riemen, String oder tape angetrieben werden, ein ruhiges, drehmomentstarkes und drehzahlstabiles Motorlaufwerk.

Diese sogenannten Motordosen sind bei den meisten Herstellern wie Scheu, Feickert, oder anderen – zu Recht – teures Zubehör, und laufen meist erst mit zusätzlichen Netzteilen – also nicht mit Steckernetzteilen – vernünftig.
Schnell ist man aber alleine damit in einem 4 stelligen € Bereich. Und der ist bei einem Rentner nicht mehr so ohne weiteres “drin”…..
Vor vielen Jahren hatte ich erste Erfahrungen mit einer Scheu Motordose gemacht. Diese lief erst richtig gut, nachdem sie mit einem Akkunetzteil versehen war……

Aber diesmal verfolge ich ein anderes Prinzip:
ein AC Motor in Sternschaltung mit einer Nennspannung von 130V als sogenannter Aussenläufer.
Hersteller war die Firma Pabst, und der Motor hat die Dimension der Wickelmotoren der gleichen Maschine.
Wer einmal eine B77 besass, weiss, wie enorm stabil der Bandtransport damit funktioniert und dass der Motor trotz seiner Grösse nahezu unhörbar ist.
Das war die zündende Idee der eigenen “Motordose”.
Technik
Der Motor läuft in der B77 an einer eigenen – sehr pfiffigen Regelelektronik.
Prinzip ist folgendes:
– der Motor ist eigentlich ein 3 phasiger Drehstrommotor, der mittels Hilfskondesator in einer Sternschaltung (Steinmetzschaltung) betrieben wird. Die Speisung erfolgt mit 130V AC über das Revox Netzteil.
Die Vorzüge dieser Motoren habe ich an anderer Stelle bereits beschrieben
– der Motor hat eine Leerlaufdrehzahl von 1400 U/Minute, die im Betrieb aber auf 300 bzw 600 U/Min reduziert werden.
Es besteht also bereits eine grosse Drehzahlreserve.
Zuständig ist dafür eine spezielle Schaltung, in der ein Tachogenerator – der direkt am Motor verbaut ist – ein Signal liefert, mit dem die Drehzahl enorm stabil eingehalten wird.
– über eine Veränderung der Sollspannungen an einem NE555 kann die Drehzahl in relativ weiten Grenzen verstellt werden. Revox hatte dies seinerzeit als Zusatzmodul vermarktet (“variable speed control”).
Sollte es nun gelingen, diese Komponenten zu verwenden und zu steuern, stünde einem vernünftigen Antrieb doch nichts mehr im Wege??
Mechanischer Aufbau
Der Motor ist in eine massive Druckgussplatte eingelassen, die an 4 Punkten fest mit dem Träger verbunden ist, ursprünglich mit dem schweren Chassis der B77.
Diese Platte bestimmte die Dimensionen des eigenen Gehäuses, und es wird schnell klar, dass das kein Miniturm wird……
Nach Vermessen von Platte und Motor wurde ein Multiplex Ring für Ober- und Unterseite gefräst, in die der Motor hängend eingelassen wird.
Um ihn frei hängen lassen zu können, ist die Distanz zur Bedieneinheit über M4 Distanzhülsen und M4 Gummipuffer realisiert.
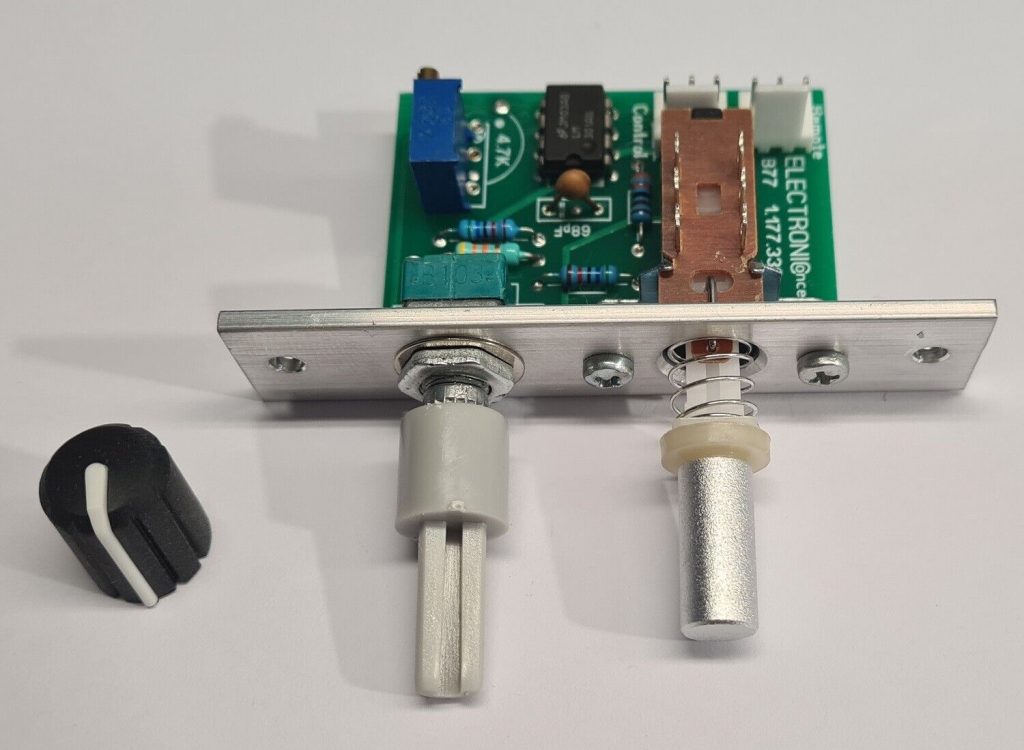
Die Bedieneinheit umfasst 3 Taster, 3 LED’s und 2 Potentiometer.
Die Taster schalten die Geschwindigkeiten, einen Reset, und verschiedene kleine Funktionen, die im Betrieb hilfreich sein können.
Die LED’s signalisieren den Betriebszustand, mit den Potentiometern können die Geschwindigkeiten feingetrimmt werden.
Die Schaltung der Motordose
Über 2 Kabel (150V AC für den Motor) und ein Sub-D Kabel ist die Motordose elektrisch mit dem eigentlichen Netzteil und der Steuer-Elektronik verbunden.
Unter der Bedieneinheit werkelt eine Platine, auf der ein MCP23017 als Kernstück die Peripherie “verwaltet” und per I2C-Bus die Daten an das Netzteil übermittelt.

Das Revox UPS Motornetzteil
Das elektrische Kernstück besteht aus 4 Einzelkomponenten:
- der Original Revox Platine mit der Tachosteuerung
- einem 24V Schaltnetzteil für Arduino nano und 21V der Revoxplatine
- einem Ringkerntrafo mit 115V Sekundärspannung
- einer Steuerplatine aus der eigenen Entwicklung
Die Steuerplatine teilt sich in folgende Bereich auf:
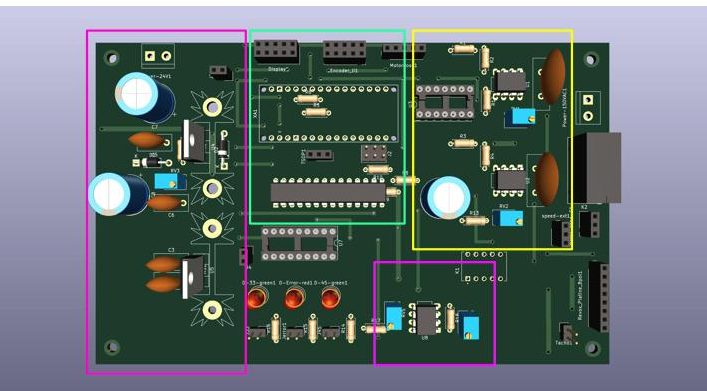
- Magenta: Netzteil mit 6V und 21V DC Ausgangsspannung
- Grün: Arduino nano und 2. MCP23017 als Steuerung
- Gelb: Nachbau der pitchregelung jeweils für 33.33 und 45.o U/Min; Hauptpoti digital
- Violett: Komparator LM393 zur Drehzahlmessung des Tellers
- unten rechts die kompatiblen Anschlusspins zur Revoxplatine
Im Brettaufbau schaut das dann so aus:

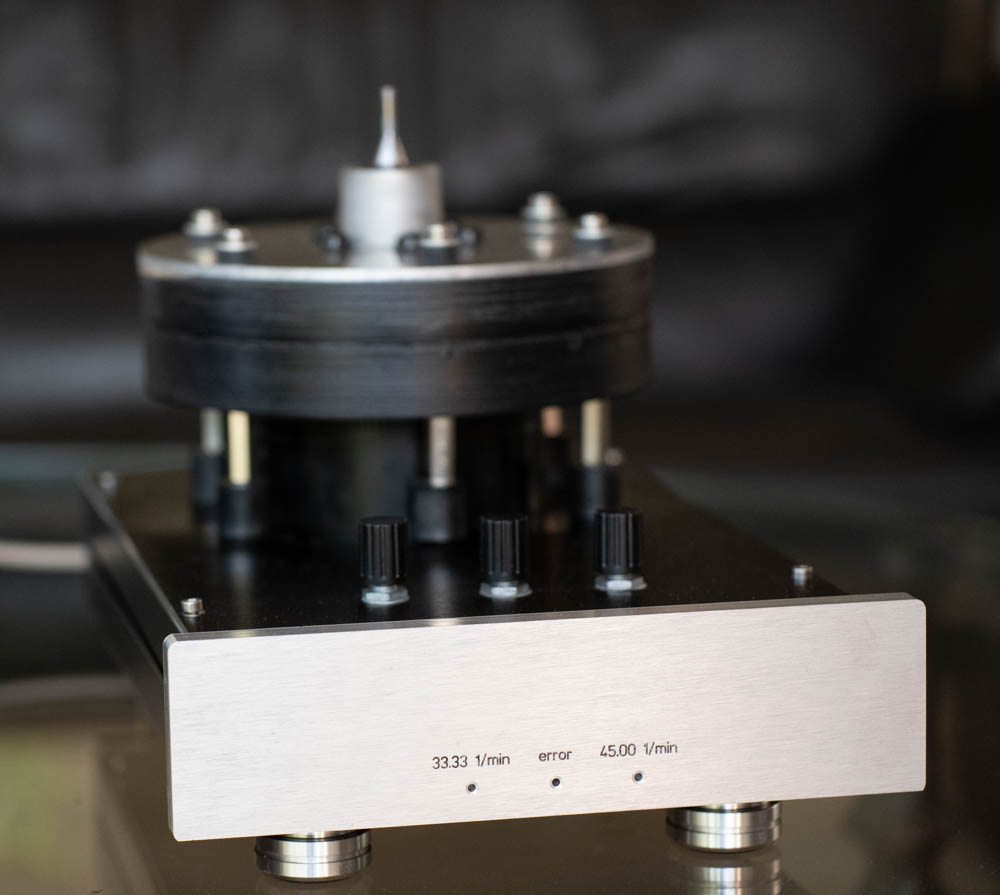
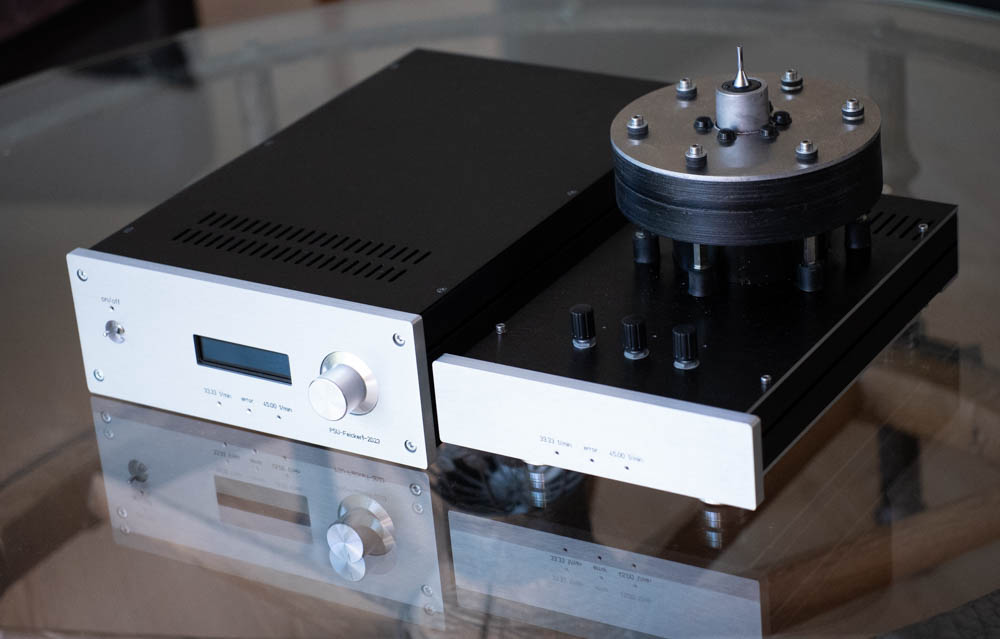
Das zugehörige Gehäuse entspricht dem HiFi2000-Standard und sieht dann so aus:

Und eine Sache habe ich nun endlich mal umgesetzt, die mich jahrelang “geärgert” hat:
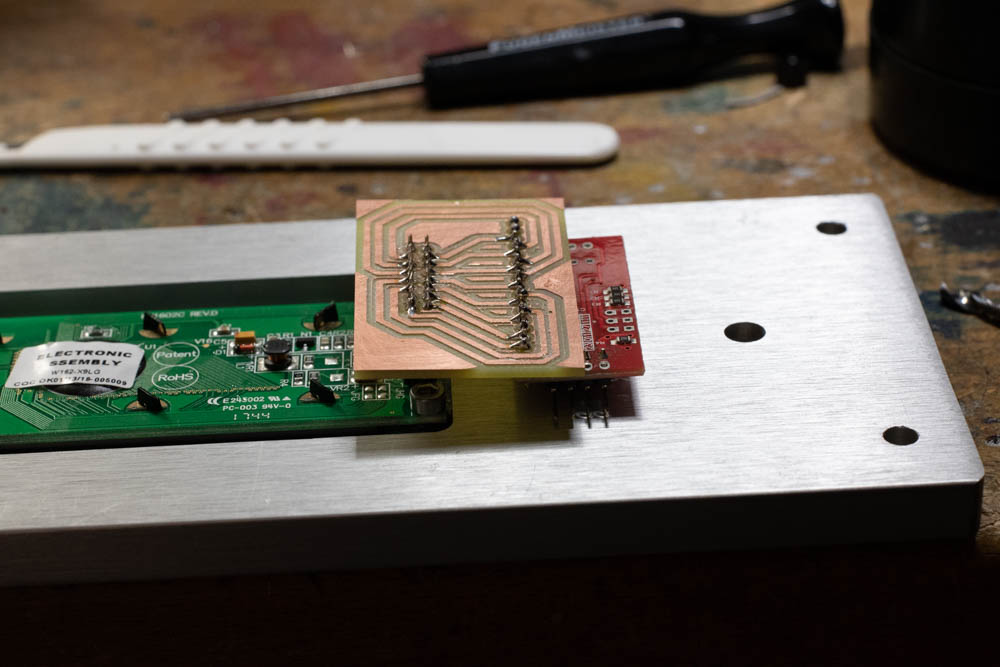
die I2C Module zur Displaysteuerung (1,95€/Stück) sind alle auf eine 1 polige Pin-Leiste ausgelegt.
Die OLED Display von Elektronik Assembly (oder jetzt unter “neuen Namen”) haben aber einen seitlichen 2×8 Pol Pin-Anschluss.
Ein einfacher Adapter löst das Thema:
Fazit
Die Hochzeit der alten Revox Hardware und der modernen Steuerelektronik hat wunderbar funktioniert.
Alle Parameter sind einstell- und steuerbar. Der Motor dreht bei 33.33 Tellerumdrehungen pro Minute gaaaaanz ruhig mit 300 U/Min seine Runden.
Die gemessene Abweichung der Motordrehzahl entspricht einem Fehler von 0,07 Teller-Umdrehungen pro Minute.
Dabei zieht der Motor völlig unbeeindruckt seine Runden. Das Aufsetzen einer Reinigungsbürste dürfte sich nicht bemerkbar machen, zumal die Masse des einmal bewegten Tellers ein übriges tut.
Eine Feinjustage unter Zuhilfenahme eines Stroboskops ist mit den Potis (Motordose) oder Drehencoder (Netzteil) einfach möglich.
Das Display am Netzteil zeigt die Drehzahl des Motors, des Tellers und eventuelle Abweichungen.
Die Parameter für String, Riemen oder Tape sind einstell- und speicherbar.
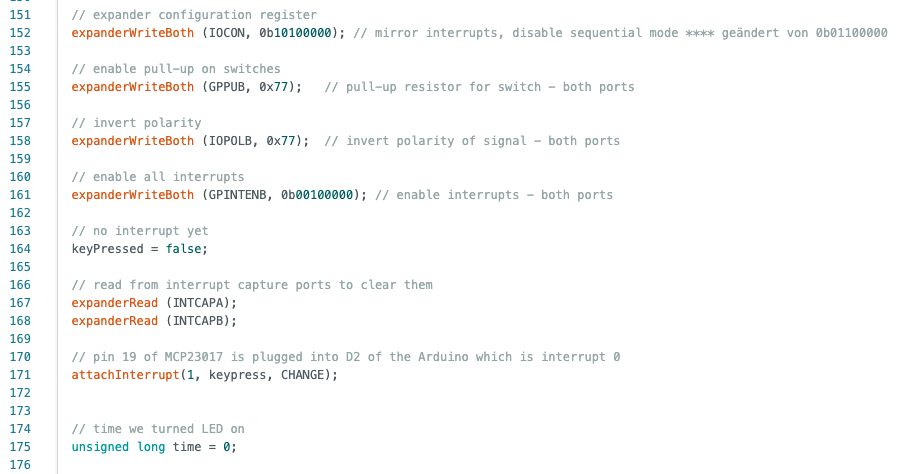
Noch einige Bemerkungen zur Software:
– die Messung und Auswertung erfolgt über eine doppelte Interruptsteuerung an MCP23017 (wo das Komparatorsignal eingelesen wird) und am Arduino (port D2, TIMER0).
Dabei war das tool von Nick Gammon und das Datenblatt hilfreich, damit gezielt der Input-Port und der Interrupt des MCP23017/Atmega328 programmiert werden können.
– die Messung der Tellerdrehzahl wird über eine CNY70 Schaltung und Auslesen am D3-Port (Timer1) erfolgen.
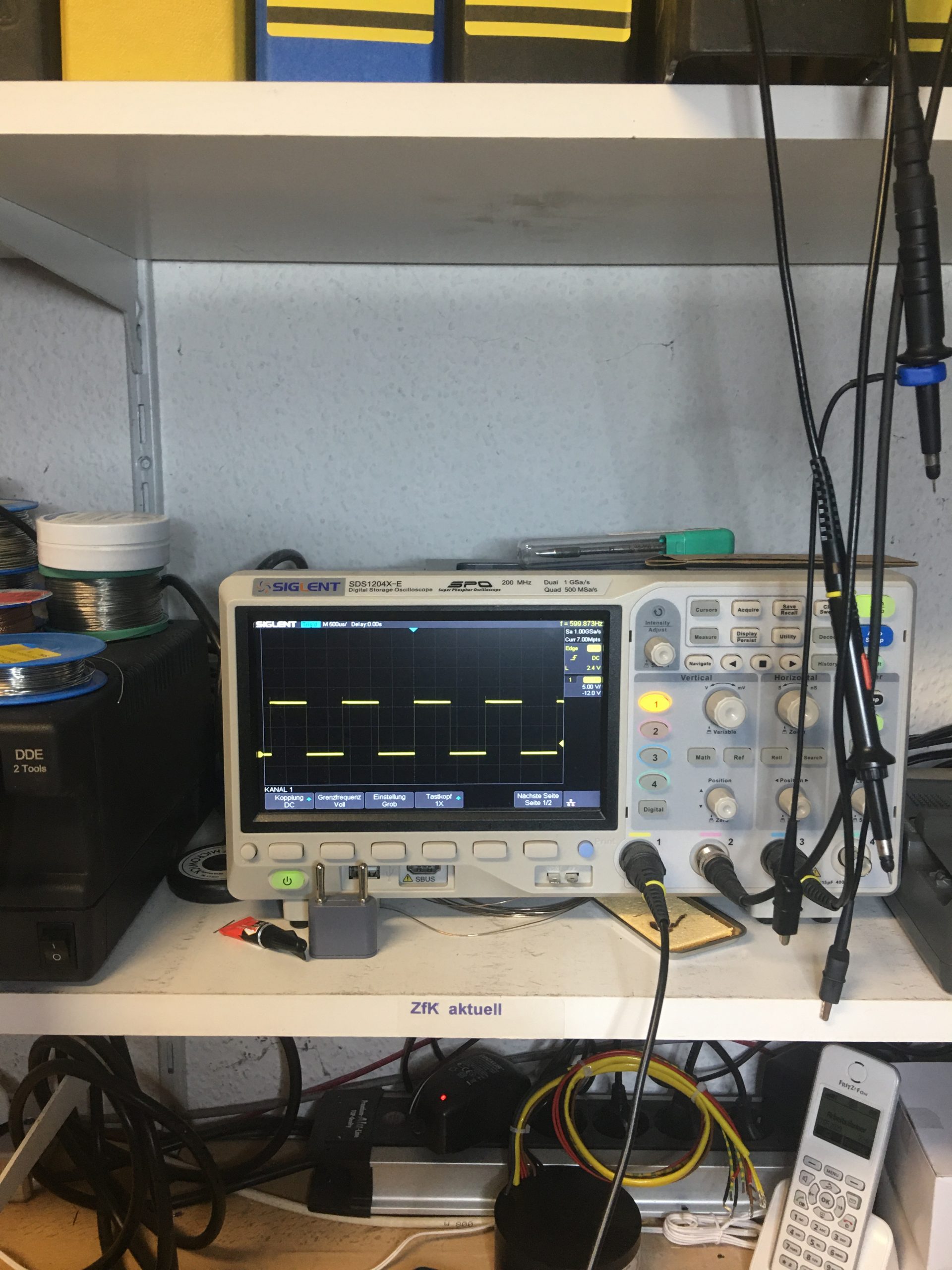
– der Komparator muss mit einer Signalstärke von 1.6mV klarkommen, was eine feine Einstellung der Schaltschwelle benötigt. Es gelingt am Besten unter Zuhilfenahme des seriellen Ports der Arduino IDE, der bei Einsetzen ausreichender Signalstärke sofort zu zählen beginnt.
Alternativ kann auch das 1,5V Rechtecksignal am Testpunkt der Revoxplatine benutzt werden!!
– ein regeltechnischer Eingriff in die Motordrehzahl ist leicht möglich – aber nicht erforderlich. Bei Beobachtungen über mehrere Stunden liegt die Motor-Nenndrehzahlabweichung gerechnet auf die Tellerdrehzahl bei 0,03 U/Min bei 33.33er Drehzahl und bei 0,005 U/Min bei der 45er Drehzahl.
Hochachtung vor den Revox-Entwicklern, die mit dieser Schaltung ihrer Zeit WEIT voraus waren.
Kosten
Da. ich in der Einleitung über die Kosten von Motordose und Netzteil sprach……
– Capstanmotor über kleinanzeigen: 25 €
– Gehäuse Hifi2000: 60 €
– Ringkerntrafo: 50€
– Oled Display 16×2: 35 €
– Schaltnetzteil 24V: 30 €
– diverse Elektronikteile aus der Schublade: 30 €
In Summe also ca. 200€ für eine technisch anspruchsvolle und zuverlössige Lösung!!
Aussicht
Nun darf der Rest des Twin kommen, um den endgültigen Aufbau zu bewerkstelligen.
Das Fertigstellen wird gesondert berichtet werden.